|
|

|

|
| e-Pub |
Section: New Results
Segmentation of plant point cloud models into elementary units
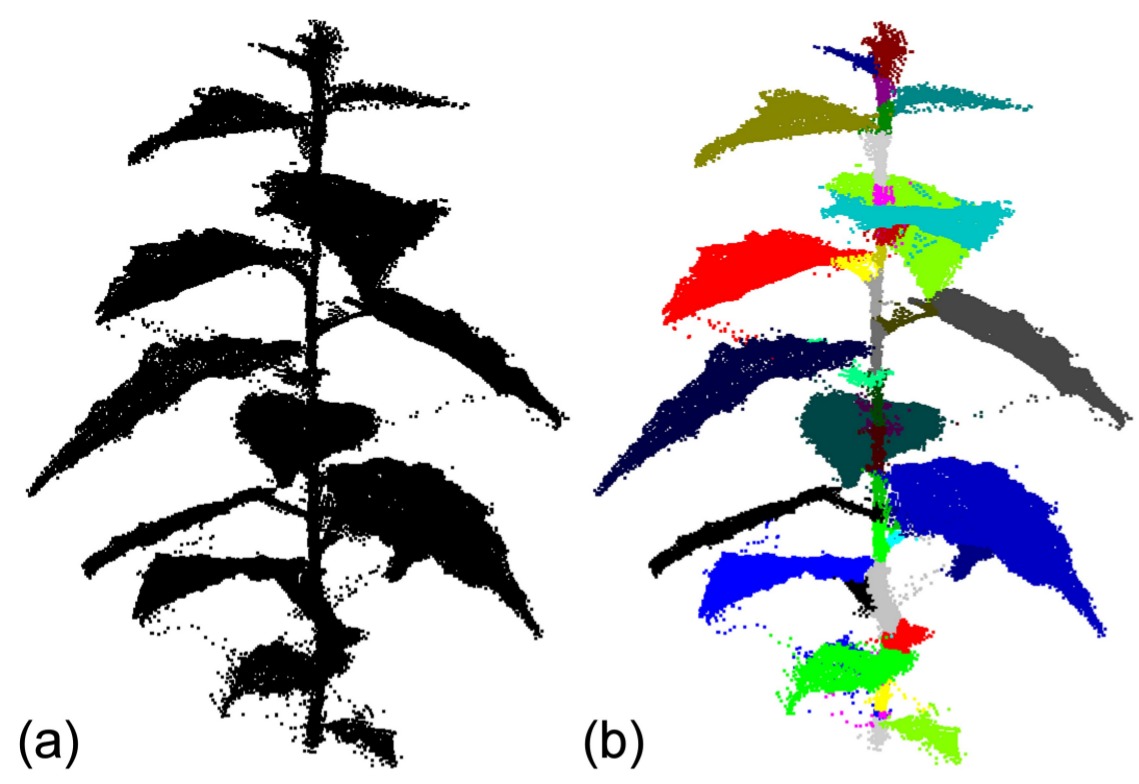
High-resolution terrestrial Light Detection And Ranging (tLiDAR), a 3-D remote sensing technique, has recently been applied for measuring the 3-D characteristics of vegetation from grass to forest plant species. The resulting data are known as a point cloud which shows the 3-D position of all the hits by the laser beam giving a raw sketch of the spatial distribution of plant elements in 3-D, but without explicit information on their geometry and connectivity. In this study we propose a new approach based on a delineation algorithm that clusters a point cloud into elementary plant units. The algorithm creates a graph (points + edges) to recover plausible neighbouring relationships between the points and embed this graph in a spectral space in order to segment the point-cloud into meaningful elementary plant units. Our approach is robust to inherent geometric outliers and/or noisy points and only considers the x, y, z coordinate tLiDAR data as an input. It has been presented at the FSPM conference [4] .